全文约1687字,阅读大约需要5分钟
我们以前在开发产品的时候,肯定会碰到一些延时需求static函数,比如常见的LED闪烁,按键消抖,控制IO口输出时序等等。
别小看延时,这个小问题,想做好,甚至要考虑到程序架构层面。
在开发板上,可能你用delay死延时,很简单。

但是有个致命的问题,就是CPU阻塞,需要等延时完,程序才能往下执行,这种在实际产品大部分情况是不能用的,还有就是这种延时时间精度也不够static函数,可能你延时500ms,实测550ms~600ms随机跳动。
如果换个主频从12MHz改为24MHz的单片机,所有定时全乱了套,改到你抓狂。
后面工作了,我就通过定时器,以全局变量来计时,然后判断变量值来判断时间,时间精度的问题解决了,但是又伴随着另一个问题,就是代码可扩展性和可移植性差,换一个项目,要增加新的延时时间,或者换一个单片机,代码又要大改。
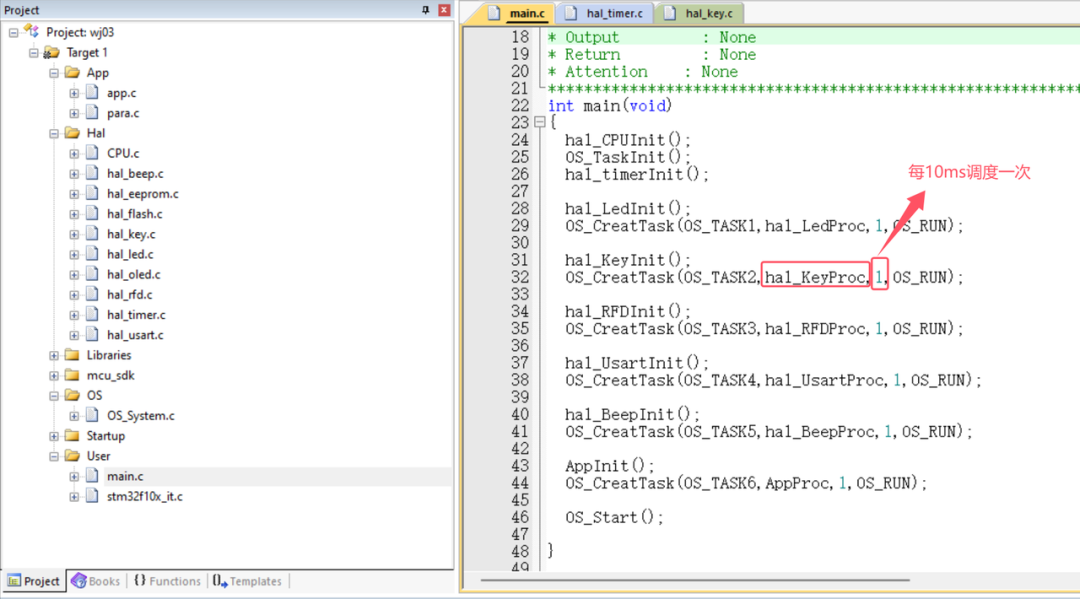
今天带你彻底解决这个问题,分享我以前做产品一直在用的定时架构,已经经过几十个项目批量验证,稳定、可扩展,可移植。
一、架构实现思路图解
1.1 核心数据结构体
typedef struct { uint16_t Period; // 定时周期(50μs单位) uint16_t CurrentCount; // 当前计数值 void (*func)(void); // 回调函数指针 TIMER_STATE_TYPEDEF state; // 状态标示} Stu_TimerTypedef;volatile Stu_TimerTypedef Stu_Timer[T_SUM]; // T_SUM建议定义8
1.2 三层架构设计

二、代码逐行解析(核心函数)
2.1 硬件初始化函数
static void hal_timer4Config(void){ // TIM4时钟使能 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure = {0}; TIM_TimeBaseStructure.TIM_Period = 50 - 1; // 50us间隔自动重装载值 TIM_TimeBaseStructure.TIM_Prescaler = SystemCoreClock/1000000 - 1; // 1MHz时基 //其它初始化代码}
2.2 定时器管理API
2.2.1 创建定时器
void hal_CreatTimer(TIMER_ID_TYPEDEF id, void (*proc)(void), uint16_t Period, TIMER_STATE_TYPEDEF state){ Stu_Timer[id].state = state; Stu_Timer[id].Period = Period; // 设置周期(50μs*Period) Stu_Timer[id].CurrentCount = 0; // 清空计数 Stu_Timer[id].func = proc; // 绑定回调函数}
3.2.2 定时器状态控制
TIMER_RESULT_TYPEDEF hal_CtrlTimerAction(TIMER_ID_TYPEDEF id, TIMER_STATE_TYPEDEF sta){ if(Stu_Timer[id].func != NULL){ Stu_Timer[id].state = sta; // 修改运行状态 return T_SUCCESS; } return T_FAIL; // 定时器未创建}
3.3 中断处理核心
void TIM4_IRQHandler(void){ if(TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET){ // 全局中断处理函数 for(uint8_t i=0; i<T_SUM; i++){ if(Stu_Timer[i].state == T_STA_START){ if(++Stu_Timer[i].CurrentCount >= Stu_Timer[i].Period){ Stu_Timer[i].state = T_STA_STOP; // 单次触发模式 Stu_Timer[i].func(); // 执行用户回调 } } } TIM_ClearITPendingBit(TIM4, TIM_IT_Update); }}
三、基础用法示例
3.1 LED闪烁(1Hz)
// 定义LED任务ID#define LED_TASK_ID 0// LED回调函数void LED_Task(void){ GPIO_WriteBit(GPIOC, GPIO_Pin_13, (BitAction)(1 - GPIO_ReadOutputDataBit(GPIOC, GPIO_Pin_13)));}int main(void){ // 硬件初始化 hal_timerInit(); GPIO_Init(GPIOC, GPIO_Pin_13, GPIO_Mode_Out_PP); // 创建定时器(10000*50μs=500ms) hal_CreatTimer(LED_TASK_ID, LED_Task, 10000, T_STA_START); while(1){ // 主循环可添加其他任务 if(需要重启定时器){ hal_ResetTimer(LED_TASK_ID, T_STA_START); } }}
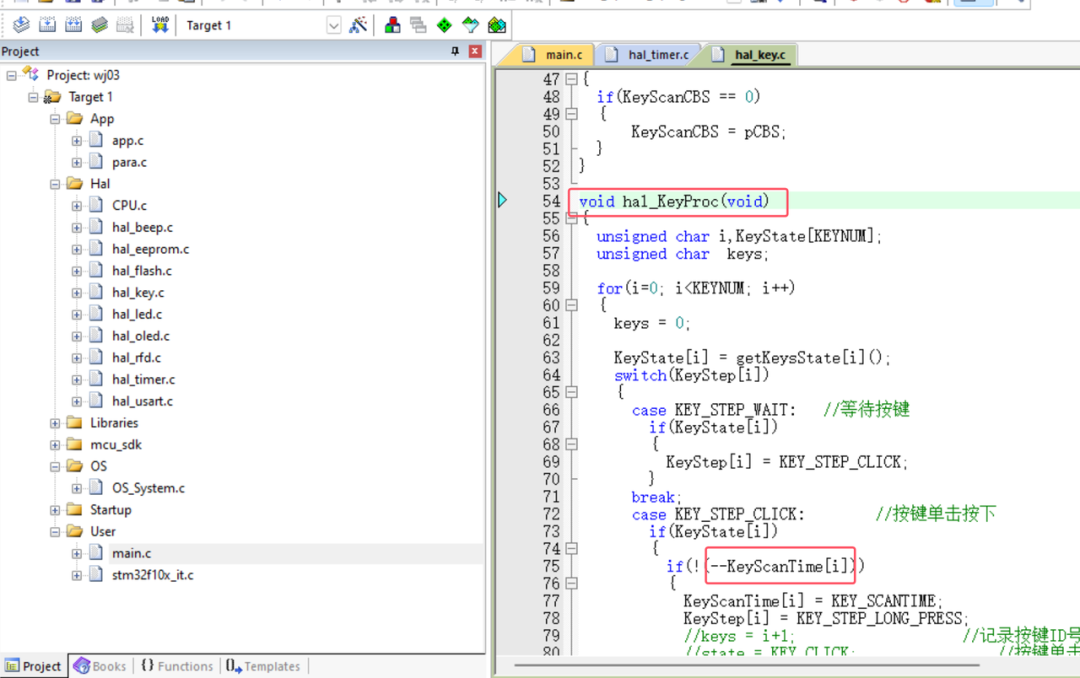
3.2 按键消抖(进阶用法)
#define KEY_TASK_ID 1uint8_t key_state = 0;void Key_Scan_Task(void){ static uint16_t press_time = 0; if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0)){ if(++press_time > 10){ // 50μs*10=0.5ms key_state = 1; } }else{ press_time = 0; key_state = 0; }}void Init_Key_Scan(void){ hal_CreatTimer(KEY_TASK_ID, Key_Scan_Task, 10, T_STA_START); // 每0.5ms扫描}
如果还是不会用,关于这个定时器架构,我在2018年也录了一套比较系统的教程,可滴滴我安排。

以上两种是比较常用了,除了这个,我们无际单片机项目里还有控制单口时序驱动外围芯片的用法,比如语音芯片等等,用起来极其灵活。
这种是通过定时器的精准定时,定时任务在定时器中断里面执行,也是有缺点的,如果定时的任务多了,就会影响实时性。
所以,有些定时,不需要要求这么高的,我们一般是配合任务的Tick,然后每个任务里设置一个变量,通过递增和递减来延时。
之前有同学问过我,怎么去验证这个定时器时间准不准?
我们在调试延时架构代码的阶段,会通过示波器,配合IO电平翻转去测试,比如10ms翻转一次,看下精度。
下面是更多无际原创的个人成长经历、行业经验、技术干货。
1.
2.
3.
4.
5.
6.
7.
8.
限时特惠:本站持续每日更新海量各大内部创业课程,一年会员仅需要98元,全站资源免费下载
点击查看详情
站长微信:Jiucxh
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。